O CRIAR avança no estado da arte em inteligência artificial e robótica ao buscar conhecimento na literatura, reproduzir resultados relevantes e desenvolver novas pipelines que integram os avanços científicos para gerar soluções inéditas e aplicáveis à indústria. Além disso, produz publicações em conferências e revistas nacionais e internacionais de grande reconhecimento acadêmico, reforçando a qualidade e o impacto dos resultados obtidos.

Imagem gerada através do GPT Image 1.5
Conjuntos de dados para classificação de lesões de pele frequentemente sofrem com forte desbalanceamento entre classes, com casos malignos significativamente sub-representados, o que leva a fronteiras de decisão enviesadas durante o treinamento de redes profundas. Enfrentamos esse desafio usando modelos de difusão condicionados por classe para gerar imagens dermatológicas sintéticas, seguidos de pré-treinamento auto-supervisionado com MAE, permitindo que modelos ViT muito grandes aprendam características robustas e relevantes ao domínio. Para viabilizar a implantação em cenários clínicos práticos, onde modelos leves são necessários, aplicamos destilação de conhecimento para transferir essas representações para um ViT estudante menor, adequado a dispositivos móveis.
Nossos resultados mostram que o pré-treinamento com MAE em dados sintéticos, combinado com destilação, melhora o desempenho de classificação, ao mesmo tempo em que permite inferência eficiente no dispositivo para uso clínico prático. Artigo publicado no ISBI 2026. Pre-print publicado no arXiv.
Imagem gerada através do GPT Image 1.5
Modelos de aprendizado profundo para análise de imagens dermatológicas ainda são sensíveis à variabilidade de aquisição e a características visuais específicas de cada domínio, o que leva à degradação de desempenho quando implantados em ambientes clínicos. Investigamos como artefatos visuais e mudanças de domínio afetam a classificação de lesões de pele baseada em deep learning. Propomos uma estratégia de adaptação, fundamentada na ideia de meta-domínios visuais, que transfere representações visuais de conjuntos maiores de dados dermatoscópicos para domínios de imagens clínicas, melhorando assim a robustez de generalização.
Experimentos em múltiplos conjuntos de dados de dermatologia mostram ganhos consistentes no desempenho de classificação e redução das diferenças entre imagens dermatoscópicas e clínicas. Esses resultados reforçam a importância de um treinamento sensível ao domínio para sistemas realmente implantáveis. Artigo publicado no ISBI 2026. Pre-print publicado no arXiv.

Imagem gerada através do GPT Image 1.5
A adoção de IA em dermatologia ainda é limitada por conjuntos de dados enviesados, qualidade de imagem variável e validação insuficiente. Apresentamos o DermAI, uma aplicação leve, baseada em smartphone, que permite a captura, anotação e classificação em tempo real de lesões de pele durante consultas de rotina. Diferentemente de ferramentas anteriores focadas em dermatoscopia, o DermAI realiza verificações de qualidade no próprio dispositivo e adaptação local do modelo. O conjunto de dados clínico do DermAI abrange uma ampla variedade de tons de pele, etnias e dispositivos de origem.
Em experimentos preliminares, modelos treinados em bases públicas não conseguiram generalizar para nossas amostras, enquanto o fine-tuning com dados locais melhorou o desempenho. Esses resultados destacam a importância de uma coleta padronizada e diversa de dados, alinhada às necessidades da saúde e orientada ao desenvolvimento de aprendizado de máquina. Artigo publicado no ISBI 2026. Pre-print publicado no arXiv.

Imagem gerada através do DALL-E
O estudo mostra como condições de captura heterogêneas (iluminação, foco, enquadramento) e artefatos (gel, marcações, sombras) enviesam modelos de IA treinados com imagens dermatológicas. A equipe treinou CNNs em quatro bases públicas (HAM10000, PAD-UFES-20, DDI e ProveAI), analisou representações latentes e correlacionou-as com metadados para avaliar diversidade. Com IA explicável e avaliação de qualidade de imagem, identificou-se que artefatos degradam o desempenho e induzem decisões espúrias.
Trabalho de 2025 premiado como 2º colocado na trilha de Inovação da 16ª Conferência Brasileira sobre Melanoma (1ª conferência internacional do GBM).
 Acesse o pôster aqui!
Acesse o pôster aqui!

Imagem gerada através do DALL-E
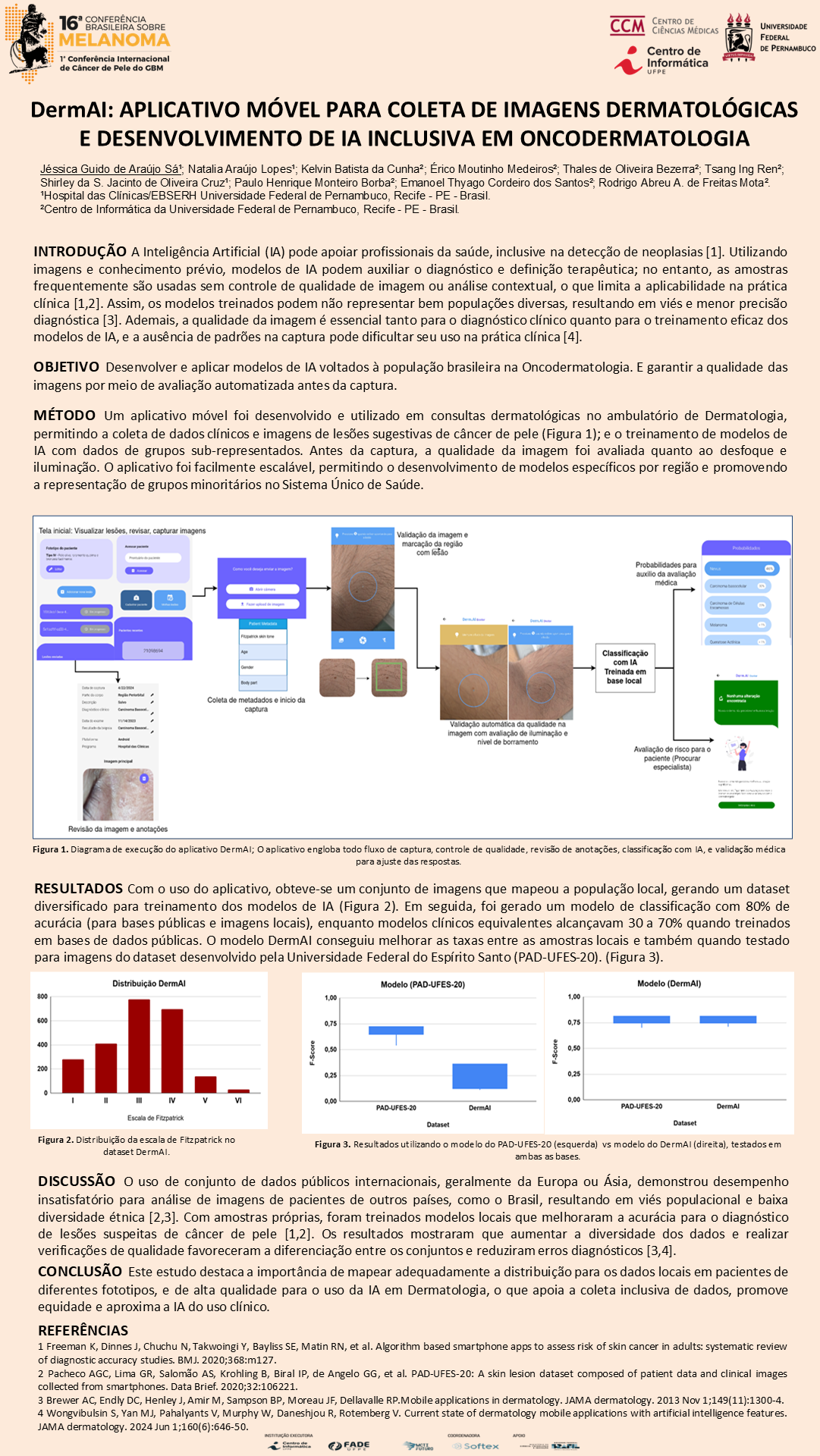
O DermAI integra coleta clínica padronizada e verificação automática de qualidade de imagem (desfoque, iluminação) para formar datasets locais, robustos e diversos voltados à realidade brasileira e ao SUS. O app foi utilizado em consultas dermatológicas em unidades públicas, permitindo treinar modelos com grupos sub-representados e escalar por região.
Trabalho de 2025 premiado como 3º colocado na trilha de Inovação da 16ª Conferência Brasileira sobre Melanoma (1ª conferência internacional do GBM).
 Acesse o pôster aqui!
Acesse o pôster aqui!
Imagem gerada através do Imagen 3
O trabalho investiga a lacuna entre imagens dermatoscópicas e clínicas em aplicações de aprendizado de máquina para diagnóstico dermatológico, destacando os desafios de generalização entre esses domínios. Os modelos atuais, treinados principalmente em dados dermatoscópicos de alta qualidade, enfrentam dificuldades ao lidar com variações intrínsecas de imagens clínicas capturadas por dispositivos não especializados, como smartphones. Problemas como diferenças de resolução, iluminação, ruído e distribuição de classes afetam a precisão na classificação, especialmente para lesões malignas, exacerbados pela escassez de dados clínicos robustos e diversificados.
A pesquisa avalia o impacto dessas variações por meio de experimentos com diferentes arquiteturas de redes neurais convolucionais (CNNs), abordando técnicas de transferência de aprendizado e fine-tuning para melhorar a adaptação em cenários clínicos. Pre-print publicado em 2025.
Imagem gerada através do DALL-E
Pesquisa sobre a avaliação de Grandes Modelos de Linguagem (LLMs) em conjunto com a Geração Aumentada por Recuperação (RAG) para uso em dispositivos móveis, um campo de crescente relevância no cenário atual da inteligência artificial. O trabalho propõe uma metodologia inovadora dividida em três etapas principais: a construção de uma base de dados que relaciona perguntas a contextos específicos, a geração de respostas utilizando diversos LLMs, e a avaliação dessas respostas por meio de um LLM Juiz, que classifica a qualidade das respostas com base em critérios objetivos.
Este trabalho oferece insights valiosos para o desenvolvimento de aplicações móveis que utilizam inteligência artificial, demonstrando como a combinação de LLMs com RAG pode resultar em sistemas mais eficientes e confiáveis para a geração e avaliação de respostas.

Imagem gerada através do DALL-E
Este estudo investiga o impacto de técnicas de pré-processamento e aumento de dados no desempenho de algoritmos de classificação de imagens dermoscópicas para diagnóstico de lesões cutâneas. Em particular, são avaliados métodos de constância de cor, que visam corrigir variações de iluminação e normalizar atributos cromáticos, facilitando a identificação de características críticas para a determinação de malignidade. O trabalho compara cinco algoritmos amplamente utilizados, incluindo Grey-World, max-RGB e Shades of Gray, aplicados tanto como pré-processamento quanto como aumento de dados durante o treinamento. As análises utilizam redes neurais convolucionais treinadas em um conjunto de dados padronizado (ISIC18) e examinam como essas abordagens impactam a generalização e o desempenho dos modelos.
Este trabalho contribui para a compreensão de limitações e oportunidades na aplicação de técnicas de normalização em imagens dermoscópicas, visando aprimorar ferramentas de inteligência artificial na dermatologia.

Imagem gerada através do Imagen 3
O trabalho aborda o desenvolvimento e a avaliação de métodos para detecção e segmentação de lesões dermatológicas utilizando imagens RGB em contextos clínicos. Para segmentação, foram implementados e comparados os modelos UNet e UNeXt, com destaque para a superioridade do UNeXt em termos de precisão (métrica Dice de 0,87) e eficiência em dispositivos móveis, essencial para aplicações práticas. A pesquisa utiliza o conjunto de dados ISIC18 para treinamento e validação, apontando a necessidade de máscaras de segmentação específicas para melhorar o desempenho em cenários clínicos reais. Além disso, o estudo avalia arquiteturas para detecção de lesões, como YOLOv7 e SSD MobileNet, utilizando dados anotados de diferentes fontes e aplicando técnicas de aumento de dados para melhorar a generalização.
A pesquisa enfatiza a importância da combinação de dados e de técnicas de pré-processamento para superar limitações de conjuntos pequenos. Por fim, os modelos foram integrados a um aplicativo móvel, demonstrando eficiência no diagnóstico assistido, com métricas promissoras, como precisão de 90% e F1-Score de 0,78, em testes realizados com imagens capturadas por smartphones.
Imagem gerada através do Imagen 3
O trabalho explora o potencial de arquiteturas baseadas em transformers para a classificação de lesões cutâneas, um campo de relevância crítica na dermatologia clínica. A pesquisa utilizou o dataset ISIC24, notável por sua significativa desproporção de classes, contendo 393 imagens de lesões malignas frente a 400.666 benignas. Para lidar com esse desequilíbrio extremo, foram adotadas estratégias como balanceamento de lotes, redução de amostras negativas e geração de imagens sintéticas via Stable Diffusion. Modelos transformers, como ViT e Swin Transformer, foram comparados a arquiteturas convolucionais, revelando que, embora mais "data-hungry", os transformers demonstraram maior atenção a atributos locais das lesões. A introdução de imagens sintéticas mostrou benefícios como maior Recall, mas desafios como sobreajuste indicam a necessidade de maior diversidade nas imagens geradas.
A pesquisa destaca a importância de estratégias inovadoras para lidar com datasets desequilibrados e melhorar a aplicação de IA na detecção de doenças dermatológicas.
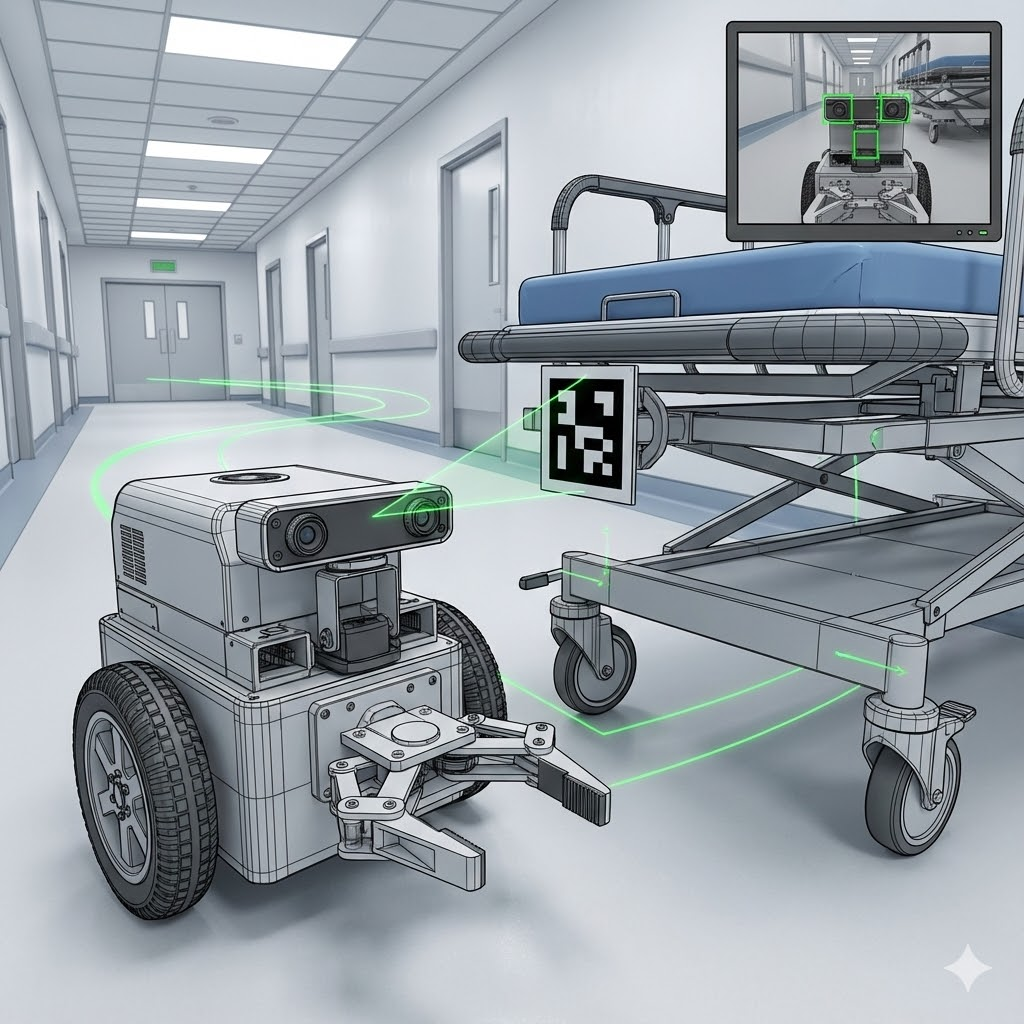
Imagem gerada através do Gemini - Nano Banana Pro
Este trabalho tem sua origem no projeto de macas autônomas e apresenta um sistema de acoplamento (docking) baseado em visão projetado para conectar autonomamente um robô de tração diferencial a uma plataforma móvel. Um marcador visual é montado na plataforma móvel, permitindo sua detecção por meio de uma câmera frontal a bordo do robô, o qual é equipado com uma garra para conectar os dois dispositivos. A conexão, semelhante a um problema de acoplamento, é realizada através da execução de uma sequência de manobras. Para isso, utiliza-se uma estratégia de controle híbrido, empregando controle baseado em posição (position-based control) para manobras grosseiras e controle baseado em imagem (image-based control) para o alinhamento final preciso, superando as restrições não-holonômicas do robô.
Numerosos testes experimentais demonstram a viabilidade do sistema e destacam seu potencial para melhorar a logística hospitalar utilizando soluções modulares de baixo custo. Artigo publicado na 22ª Conferência Internacional de Robótica Avançada (ICAR 2025).

Imagem gerada através do Gemini - Nano Banana Pro
Circuitos Quânticos Variacionais (VQCs) são alternativas viáveis para a implementação de circuitos quânticos em processadores quânticos atuais. VQCs são circuitos reduzidos com parâmetros que são treinados para minimizar uma função de perda para um determinado problema. Neste trabalho, propomos uma abordagem para otimizar os parâmetros de um VQC utilizando Algoritmos Genéticos (AGs). Exploramos diferentes configurações de AG em 3 bases de dados — conjuntos de dados Sonar, Cancer e Banknotes, comparando a abordagem proposta com 2 otimizadores clássicos baseados em gradiente descendente.
Os resultados mostram que os algoritmos genéticos podem otimizar efetivamente os pesos dos circuitos variacionais para alcançar alta acurácia de classificação com velocidade de convergência até 7,3 vezes (na base de dados Sonar), 4,8 vezes (base de dados Cancer) e 3,7 vezes (base de dados Banknote) maior em comparação com os otimizadores tradicionais. Os resultados experimentais indicam que o algoritmo genético alcança métricas de desempenho significativamente superiores ou, pelo menos, comparáveis às obtidas pelos otimizadores baseados em gradiente descendente, demonstrando o potencial e a robustez das estratégias evolutivas no treinamento de circuitos quânticos variacionais. Artigo publicado na International Joint Conference on Neural Networks (IJCNN 2025).

Imagem gerada através do Gemini - Nano Banana Pro
Desde 2000, o Brasil realiza eleições totalmente informatizadas utilizando urnas eletrônicas. Para comprovar o funcionamento e a segurança das urnas eletrônicas de forma transparente, são realizados alguns testes, incluindo o teste de integridade. Este teste é executado em todo o território nacional em locais definidos para cada estado brasileiro, envolvendo um número considerável de pessoas. Aqui, apresenta-se um sistema de automação para o teste de integridade, composto por um braço robótico e um software que utiliza visão computacional, voltado para as duas versões de urnas eletrônicas utilizadas nas eleições presidenciais de 2022. Foram realizados dois dias de testes: uma simulação do teste de integridade em laboratório e um teste durante o teste de integridade real da eleição de 2022.
O sistema conseguiu efetuar entre 197 e 232 votos durante os testes, com um tempo médio de votação entre 2 minutos e 15 segundos a 2 minutos e 43 segundos, dependendo da versão da urna e do dia do teste, e erros entre 1,48% e 3,72%, incluindo erros de leitura e digitação. O sistema permite reduzir o número de pessoas por urna eletrônica e aumentar a transparência e a eficiência do teste de integridade. Artigo publicado na 19ª International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP 2024).
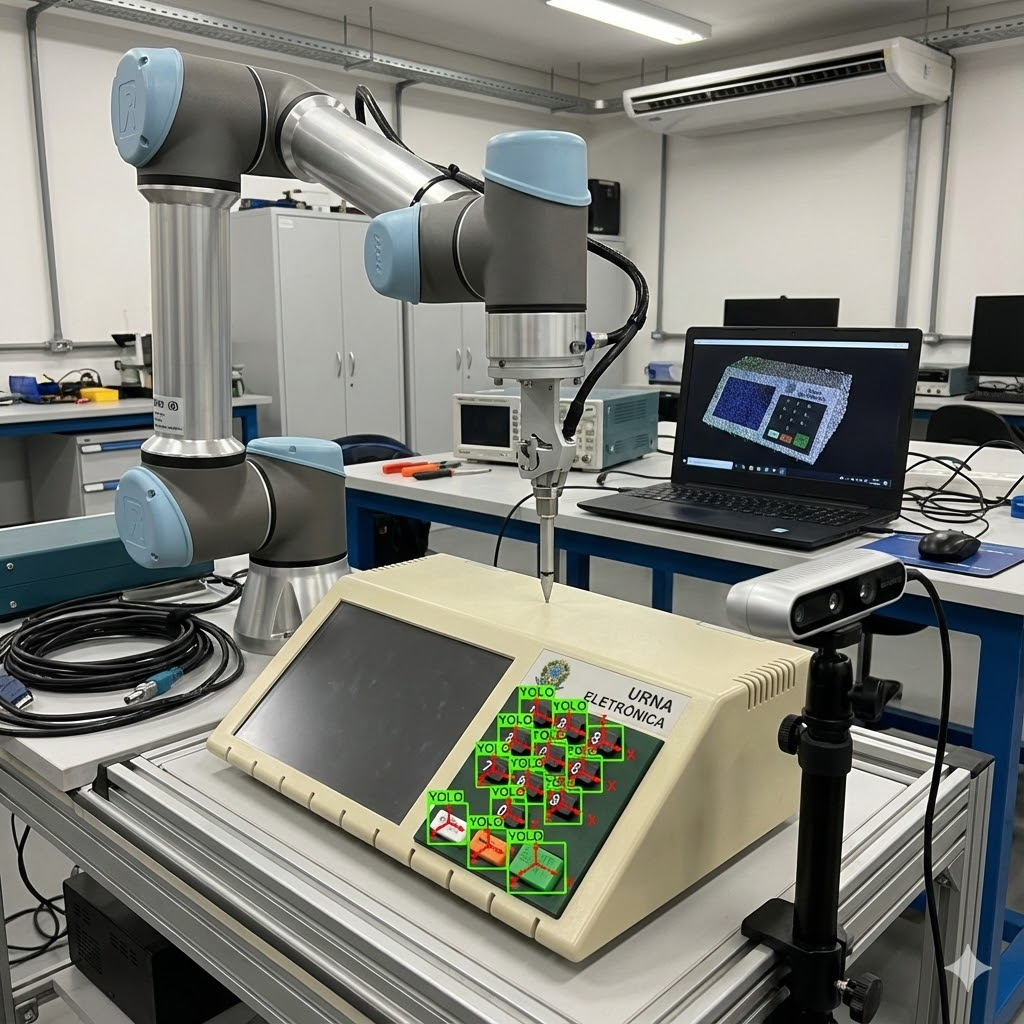
Imagem gerada através do Gemini - Nano Banana Pro
O sistema eleitoral brasileiro utiliza a urna eletrônica para aumentar a segurança do voto e a velocidade da apuração. Ela é submetida a diversos testes de segurança, sendo que aquele que envolve maior interação humana e pessoal é o teste de integridade. Nosso macroprojeto propôs uma solução para otimizar o processo de teste e reduzir a quantidade de pessoas envolvidas, utilizando um braço robótico com o auxílio de visão computacional para otimizar a demanda de pessoal de 8 pessoas para 2. No entanto, para usar o robô, ainda era necessário conhecimento técnico, e ele não podia ser operado por qualquer usuário, pois era preciso mapear manualmente as teclas para os locais onde o braço robótico pressionaria para realizar o teste. Apresentamos uma solução para mapear automaticamente um espaço de trabalho para um braço robótico. Utilizando uma câmera RGB-D e técnicas de visão computacional com aprendizado profundo (deep learning), conseguimos mover o braço robótico com 6 Graus de Liberdade (DoF) através de ações cartesianas dentro de um espaço de trabalho. Para isso, utilizamos uma rede YOLO, o mapeamento do espaço de trabalho do robô e uma correlação de pontos 3D da câmera para as coordenadas do espaço de trabalho do robô.
Com base nos testes realizados, os resultados mostram que fomos capazes de mapear os pontos de interesse com alta precisão e traçar um planejamento de trajetória para que o robô os alcançasse. A solução foi então aplicada em um cenário de teste real durante o primeiro turno das eleições brasileiras de 2022, e os resultados obtidos foram compatíveis com a abordagem convencional não assistida. Artigo publicado na 18ª International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP 2023).
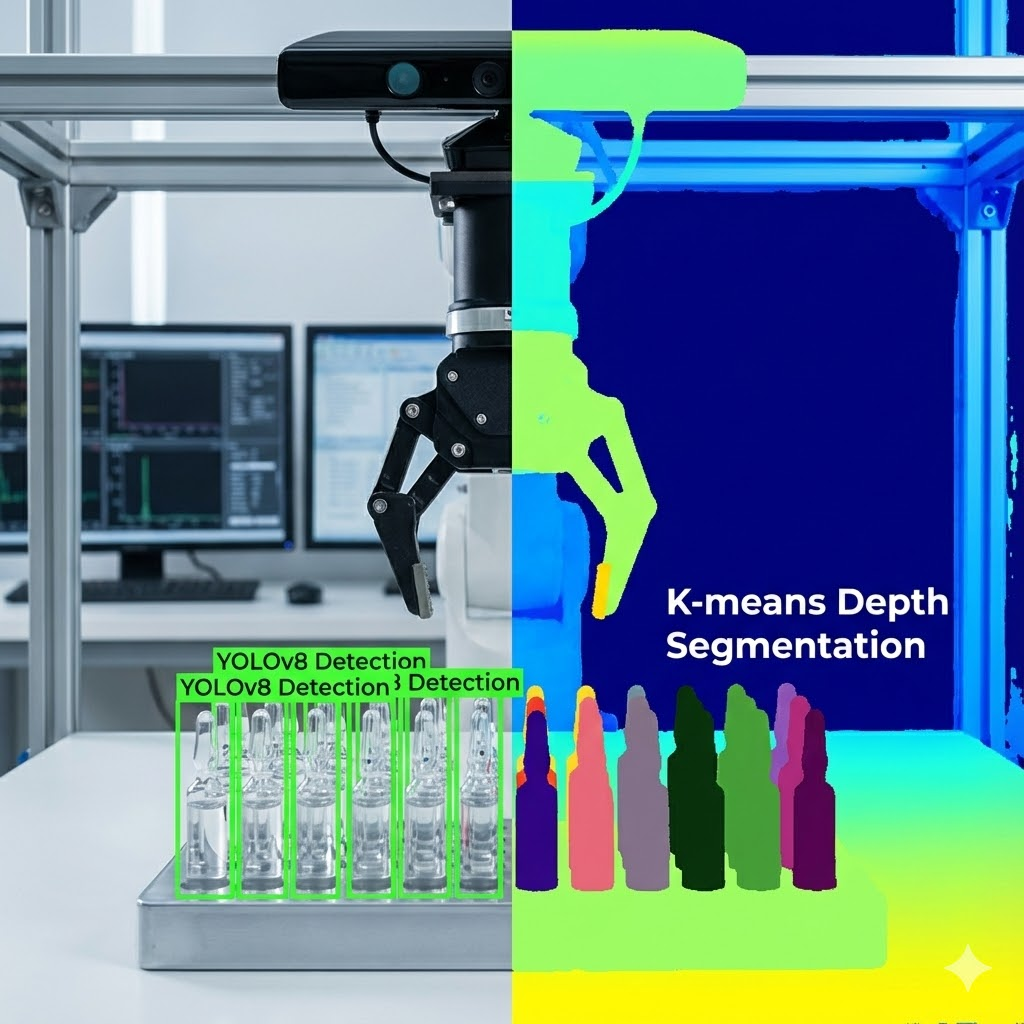
Imagem gerada através do Gemini - Nano Banana Pro
O rempacotamento de medicamentos em doses unitárias envolve o corte de blisters para separar cada comprimido, mantendo a integridade da embalagem original. Posteriormente, os comprimidos são reembalados, incluindo informações essenciais para a identificação do medicamento. O processo de corte de medicamentos é atualmente realizado de forma manual na maioria dos hospitais, e sua automação tornaria este processo mais eficiente e otimizado. Este artigo visa gerar trajetórias de corte possíveis para reempacotar blisters em doses unitárias de forma automática.
A abordagem proposta utiliza uma rede neural convolucional (YOLOv8) para detectar os comprimidos, combinada com o algoritmo de Diagrama de Voronoi para gerar as trajetórias de corte. Como resultado, a rede de detecção treinada com 8.856 imagens rotuladas de blisters e comprimidos alcançou uma precisão média (mean Average Precision - mAP) de 99,0%. Além disso, foram utilizados 60 layouts de blisters, e o algoritmo proposto previu e gerou com sucesso as trajetórias de corte para 48 tipos. Artigo publicado na IEEE 20ª International Conference on Automation Science and Engineering (CASE 2024).
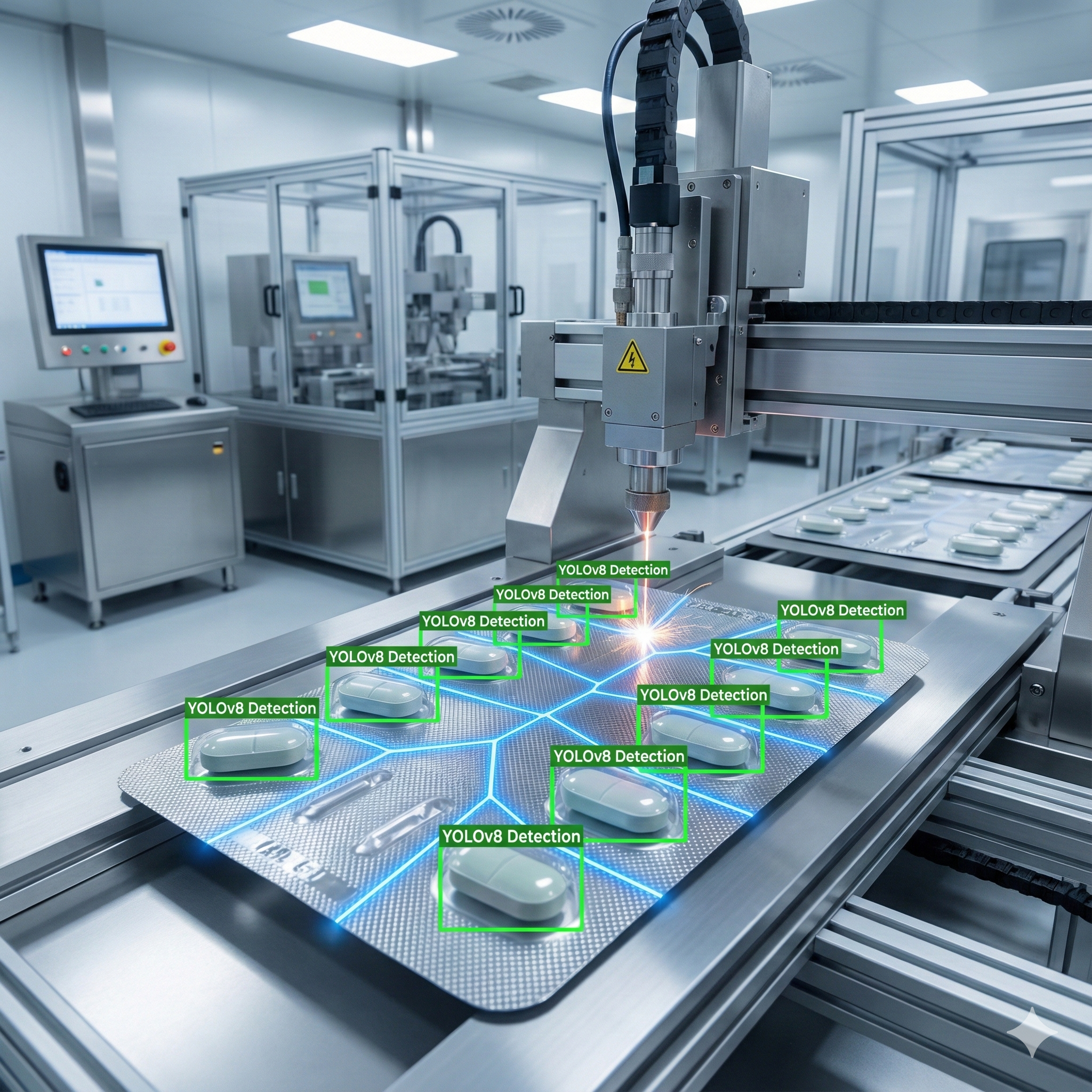
Imagem gerada através do Gemini - Nano Banana Pro
O rempacotamento de medicamentos em doses unitárias envolve o corte de blisters para separar cada comprimido, mantendo a integridade da embalagem original. Posteriormente, os comprimidos são reembalados, incluindo informações essenciais para a identificação do medicamento. O processo de corte de medicamentos é atualmente realizado de forma manual na maioria dos hospitais, e sua automação tornaria este processo mais eficiente e otimizado. Este artigo visa gerar trajetórias de corte possíveis para reempacotar blisters em doses unitárias de forma automática. A abordagem proposta utiliza uma rede neural convolucional (YOLOv8) para detectar os comprimidos, combinada com o algoritmo de Diagrama de Voronoi para gerar as trajetórias de corte.
Como resultado, a rede de detecção treinada com 8.856 imagens rotuladas de blisters e comprimidos alcançou uma precisão média (mean Average Precision - mAP) de 99,0%. Além disso, foram utilizados 60 layouts de blisters, e o algoritmo proposto previu e gerou com sucesso as trajetórias de corte para 48 tipos. Artigo publicado na IEEE 20ª International Conference on Automation Science and Engineering (CASE 2024).

Imagem gerada através do Gemini - Nano Banana Pro
As deficiências identificadas na fase pré-analítica do setor laboratorial, tais como falhas na distribuição e manuseio adequados de tubos de ensaio, destacam a necessidade de incorporar tecnologia robótica. Esta abordagem promove melhorias operacionais e contribui para a redução de resultados atípicos. Os processos em questão oferecem amplas oportunidades para automação, pois são caracterizados por alta repetitividade e exigem esforço significativo. Neste contexto, o presente trabalho visa avaliar a eficiência do sistema desenvolvido para detectar e manipular com precisão tubos de ensaio em tempos reduzidos, fornecendo um sistema automático para o manuseio de amostras. A estrutura desenvolvida inclui um braço robótico Kinova Gen3 Lite, uma câmera Intel RealSense D405, um sistema de detecção baseado em YOLOv8 e um dispositivo de sucção para a captura dos tubos. Foram avaliados a precisão da captura, a duração do processo e a qualidade da detecção.
Os resultados obtidos permitiram o estabelecimento de configurações operacionais aprimoradas, visto que o sistema demonstrou desempenho satisfatório. O processo de manipulação alcançou uma taxa de precisão de 83,33%, com um tempo médio de operação de 58 segundos por tubo de ensaio. Em relação ao sistema de detecção, a precisão atingiu 98,5% e 90,9% para as duas redes utilizadas. Estes dados fundamentam a eficácia do sistema desenvolvido, destacando sua capacidade de proporcionar uma manipulação precisa e eficiente de tubos de ensaio. Artigo publicado na IEEE 20ª International Conference on Automation Science and Engineering (CASE 2024).

Imagem gerada através do Gemini - Nano Banana Pro
Este trabalho apresenta uma ferramenta baseada em processamento digital de imagens para o fracionamento de blisters de medicamentos, que utiliza uma combinação de aquisição e segmentação de imagem para detectar com precisão blisters individuais e traçar a trajetória de corte que separa adequadamente os comprimidos em uma cartela de blister. A ferramenta proposta foi avaliada utilizando um conjunto de fotos de blisters de medicamentos, e os resultados mostraram que ela foi capaz de detectar e segmentar os blisters com um certo grau de precisão. Artigo publicado no XXIX Congresso Brasileiro de Engenharia Biomédica (CBEB 2024)

Imagem gerada através do Gemini - Nano Banana Pro
Este trabalho trata do problema de mapeamento topológico e localização utilizando visão, ou seja, reconhecimento visual de lugares. É proposto o projeto de um sistema de reconhecimento visual de lugares, baseando-se em um conjunto de Mapas Auto-Organizáveis acoplado ao extrator de características VGG-16. Primeiramente, o uso da VGG-16 permite a extração de características visuais em ambientes variáveis de maneira robusta. Em seguida, diversos Mapas Auto-Organizáveis são utilizados para mapear o ambiente, dividindo o conjunto de dados em categorias e, posteriormente, em subcategorias. Esta abordagem visa reduzir o número de imagens testadas durante o processo de localização, reduzindo assim o tempo de processamento. A abordagem proposta é avaliada no conjunto de dados St. Lucia e comparada com dois métodos do estado da arte: SeqSLAM e MPF. Ela apresenta um desempenho de Precisão-Revocação ligeiramente inferior ao MPF, mas melhor que o SeqSLAM, exigindo um tempo computacional até 20 vezes menor que o MPF. Artigo publicado no Simpósio Latino Americano de Robótica (LARS 2023)

Imagem gerada através do Gemini - Nano Banana Pro
O setor varejista tem passado por uma transformação na qual a incorporação de tecnologias ao processo de compra está se tornando cada vez mais comum, visando proporcionar uma melhor experiência para os consumidores. Neste contexto, este artigo busca propor uma solução que utiliza hardware embarcado em carrinhos de compras para aprimorar a experiência de compra, principalmente agilizando o processo de pagamento ao permitir que os clientes escaneiem os códigos de barras dos produtos desejados sem ter que enfrentar longas filas. Também visa fornecer um mapa do supermercado, indicando a posição atual do carrinho. Para alcançar esses objetivos, utilizou-se visão computacional para reconhecer códigos QR fixados no teto. Seguindo esta metodologia, foram obtidos resultados satisfatórios, com caminhos para melhorias e possíveis alterações a serem feitas no projeto para alcançar maior precisão na estimativa da localização do carrinho. Artigo publicado no 20º Congresso Latino-Americano de Software Livre e Tecnologias Abertas (LATINOWARE 2023)
2026 All Rights Reserved. Design by Free html Templates Distributed by ThemeWagon